
André Mateus
Ericsson Research
Torshamnsgatan 23, 164 40 Kista
andre.mateus(at)ericsson.com
I am a Senior Researcher at Ericsson Research with the Cyber-Physical Systems Sensing & Perception team.
I hold a M.Sc. (2015) and a Ph. D. (2022) in Electrical and Computer Engineering from Instituto Superior Técnico, Universidade de Lisboa.
Since 2018, I have been a Member of the Institute of Electrical and Electronics Engineers (IEEE).My research interests include Computer Vision and Robotics, particularly Visual Servoing; Active Vision; Structure-from-Motion; and SLAM.
Latest News
- 📄 Paper accepted at ICCV 2025
- 📄 Paper accepted at CVPR 2025
- 📄 Paper accepted at SIAM Journal on Imaging Sciences
- 📄 Paper accepted at Privacy Enhancing Technologies Symposium 2024
- 🎮 Demo accepted at Symposium on Edge Computing 2023
- 📄 Paper accepted at International Journal of Computer Vision
Selected Projects and Publications
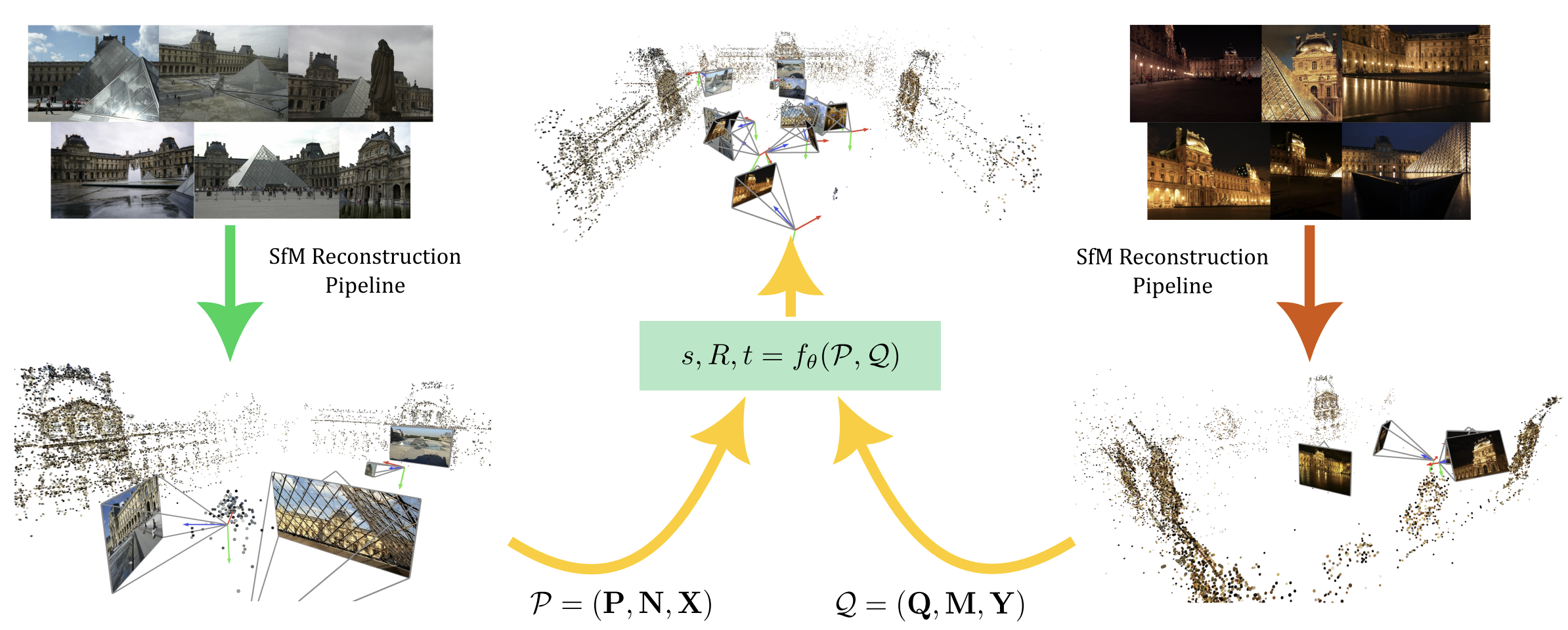
Collaborative Structure-from-Motion
- J. Edstedt, A. Mateus, A. Jaenal. ColabSfM: Collaborative Structure-from-Motion by Point Cloud Registration , 2025. [arXiv:2503.17093,code];
3D Registration with Line Intersections [project page]
- A. Mateus, S. Ranade, S. Ramalingam, and P. Miraldo. Fast and Accurate 3D Registration from Line Intersection Constraints. In International Journal of Computer Vision (IJCV), 2023 [doi,code];
- A. Mateus, S. Ramalingam, and P. Miraldo. Minimal solvers for 3d scan alignment with pairs of intersecting lines. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2020 [doi];
Active Structure-from-Motion using Lines
- A. Mateus, O. Tahri, A. P. Aguiar, P. U. Lima, and P. Miraldo. On incremental structure from motion using lines. IEEE Trans. Robotics (T-RO), 2021. [arXiv:2203.01879,doi];
- A. Mateus, P. U. Lima, and P. Miraldo. An observer cascade for velocity and multiple line estimation. In IEEE Int’l Conf. Robotics and Automation (ICRA), 2022. [arXiv:2203.01879,doi];
- A. Mateus, O. Tahri, and P. Miraldo. Active Structure-from-Motion for 3D Straight Lines. In IEEE/RSJ Int’l Conf. Intelligent Robots and Systems (IROS), 2018 [arXiv:1807.00753,doi];
Human-Aware Navigation
- A. Mateus, D. Ribeiro, P. Miraldo, and J. C. Nascimento. Efficient and Robust Pedestrian Detection using Deep Learning for Human-Aware Navigation. Robotics and Autonomous Systems (RAS), 2019 [arXiv:1607.04441,doi];
- D. Ribeiro, A. Mateus, P. Miraldo, and J. C. Nascimento. A Real-Time Deep Learning Pedestrian Detector for Robot Navigation. In IEEE Int’l Conf. Autonomous Robot Systems and Competitions (ICARSC), 2017 [arXiv:1607.04436,doi];